Technik und Sprache (10.2): SMARTBIRD, einen Online-Text lesen 20.08.2016, 07:13
Der SmartBird, ein ultraleichtes und leistungsstarkes Flugmodell bildet den Vogelflug nach. Auf der Basis seiner Beschreibung im Internet soll diese analysiert und mit Aufgaben verständlicher werden.
SMARTBIRD, Online-Text und Vogel in drei Ansichten
Im tec.LF-Beitrag »Technik und Sprache (10.1): Was ist ein Gelenktorsionsantrieb?« berichteten wir von der Idee der Firma FESTO, der Kinematik des Vogelflugs auf den Grund zu gehen. Die Darstellung des Projekts im Internet1) nehmen wir als Beispiel dafür, wie sich Technik und Sprache zusammenbringen lassen. Dass uns dabei mancher Stolperstein im Weg liegen würde, zeigt bereits die bloße Aufzählung der aus dem Text entnommenen Fachbegriffe: Aerodynamik, Gelenktorsionsantrieb, aktive Torsion, passive Torsion, Agilität, Energieeffizienz, Funktionsintegration, Kybernetik, Aktuator, Anstellwinkel, Armflügelholm, Außenflügelrippe, Mikrocontroller ... Auch wenn darin eine faszinierende Erfindung beschrieben wird, glauben wir, dass im Fachchinesisch manches deutsche Wort zu finden gewesen wäre.
An dieser Stelle müssen wir darauf hinweisen, dass die Autoren als Zielgruppe wohl höher gebildete Fachleute im Blick haben.
{kind=link}
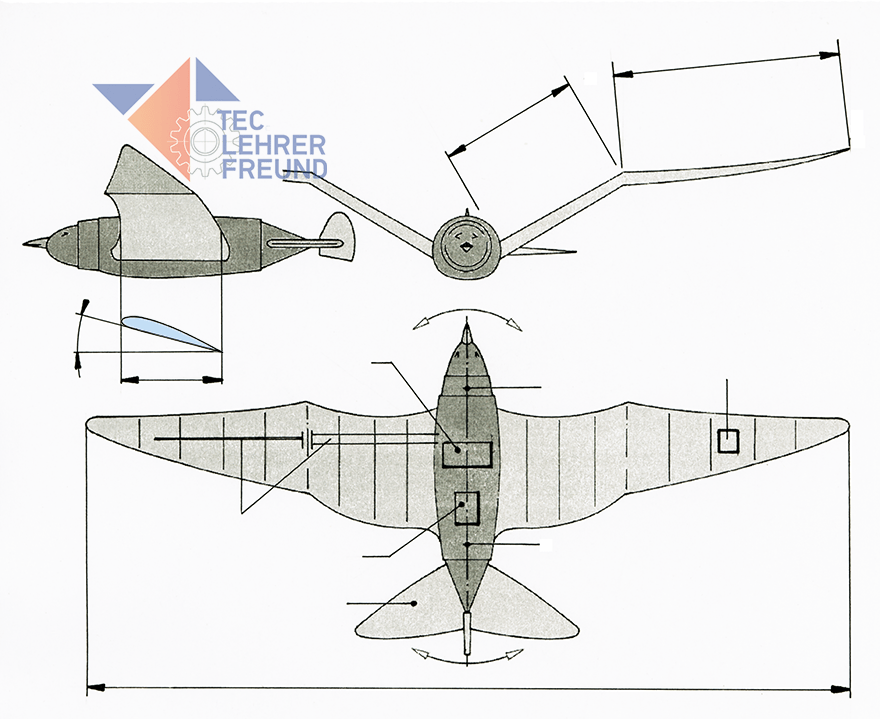
Der tec.LEHRERFREUND hat den Vogel in drei Ansichten gezeichnet. Sie sollen unter Anleitung des Lehrers mit Fachausdrücken vervollständigt werden. Aufgabenvorschläge dazu weiter unten.
Der FESTO-Text ist in folgende Kapitel gegliedert:
a) Aktiver Gelenktorsionsantrieb/ Flügel: Auf- und Vortrieb des Vogels/ Optimaler Schub durch partiell lineare Kinematik/ Rumpf: sicheres Gehäuse für die Technik/ Schwanz: Hilfe bei Auftrieb und Steuerung
b) Messen, Steuern und Regeln/ Intelligentes Monitoring/ Theoretische Grundlage
c) Wissenschaftliche Begleitung/ Wirkungsgrade als Maß für die Effizienz/ Strömung optimal nutzen/ Paradigmenwechsel durch Bionik
d) Mechatronischer Gesamtentwurf/ Energieeffizient und ressourcenschonend/ Mögliche Applikationsfelder/ Betriebssicherheit durch Condition Monitoring
1) Wir danken der Firma Festo dafür, dass wir den Text übernehmen durften.
Aufgabe 1 Lesen Sie den Onlinetext; er steht ganz unten.
Gruppenarbeit: Versuchen Sie, die Aussage der Texte möglichst kurz wiederzugeben. Ihr Text sollte höchstens die halbe Länge des Originaltexts besitzen.
Streichen Sie Ihnen unbekannte Fremdwörter an und diskutieren sie in der Gruppe darüber. Verwenden Sie in Ihrem Text keine Angaben, die Ihnen nicht klar sind.
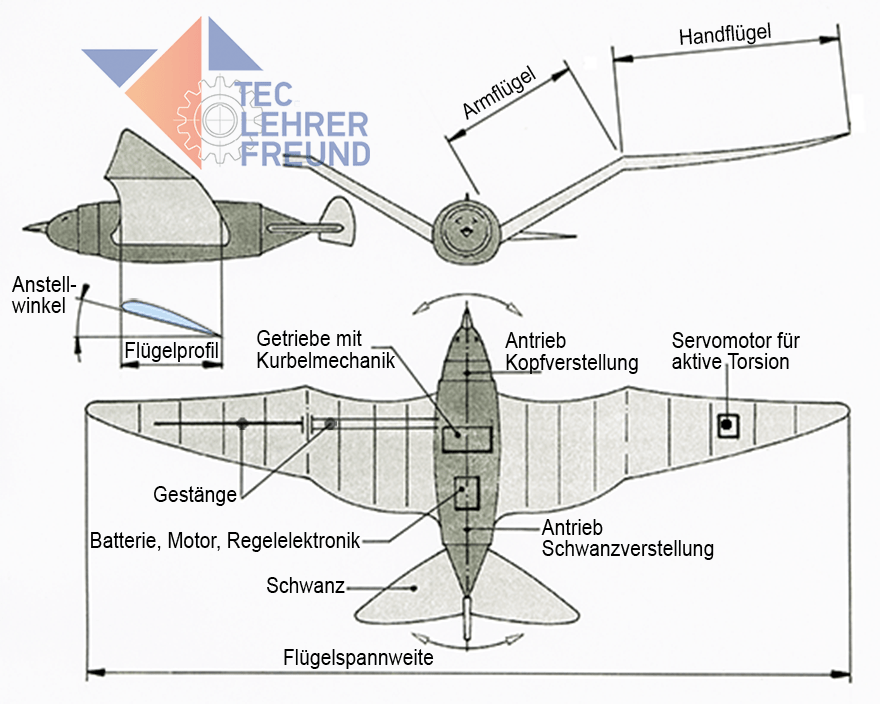
Aufgabe 2 Tragen Sie in die Zeichnung oben folgende im FESTO-Text genannten Bauteile oder Baugruppen ein:
Anstellwinkel, Antrieb für Kopfverstellung, Antrieb für Schwanzverstellung, Armflügel, Batterie – Motor – Regelelektronik, Flügelspannweite, Flügelprofil, Gestänge, Getriebe mit Kurbelmechanik, Handflügel, Servomotor für aktive Torsion.
Lösungsvorschläge
Aufgabe 1 FESTO-Text kürzen
Texte a) Vogelflügel machen zwei Bewegungen: Sie schwingen auf und ab und verdrehen sich. Verdrehung = Torsion. Die Verdrehung beim Kunstflügel ist eine aktive Torsion. Der Rumpf nimmt Batterie, Motor und Getriebe, die Kurbelmechanik sowie die Steuer- und Regelelektronik auf. Vom Getriebe aus geht über ein Pleuelgelenk die Schlagleistung in den Handflügel. Auch die Kopf- und Rumpfpartie haben zwei elektrische Antriebe.
Der Flügel schlägt nach oben: Servomotor verdreht Handflügelende auf positiven Anstellwinkel, dann auf negativen Winkel. Damit erzeugt die Luftströmung die Schubkraft.
Auch der Schwanz erzeugt Auftrieb. Für Kurvenflüge wird der Schwanz schräg gestellt.
Texte b) Die Bordelektronik, deren Herz der Mikrocontroller ist, steuert die Flügeltorsion. Das Schlagen und Verwinden der Flügel erfordern eine durchgängige Angleichung und Kontrolle. Die Elektronik stellt sich dabei in Mikrosekunden auf die jeweilige Flugposition ein. Die Qualität der aktiven Torsion ist für einen guten aerodynamischen Wirkungsgrad wichtig.
Texte c) Die theoretischen Grundlagen für den künstlichen Vorgelflug lieferte der französiche Physiologe Marey. Von ihm stammt ein Bremsdynamometer, der auch für die Entwicklung des SmartBird verwendet wurde. Seine Messungen erlauben eine Berechnung des Wirkungsgrads. Beim SmartBird wurde ein aerodynamischer Wirkungsgrad von etwa 80 % ermittelt. Der Vogelantrieb erfordert etwa 25 Watt Leistung.
Texte d) Mit dem SmartBird entstand aus einer Idee mit zahlreichen einzelnen Lösungen ein faszinierendes Gesamtobjekt. Es beinhaltet eine ausgefeilte Mechanik, elektrische Antriebstechnik, Erkenntnisse aus der Strömungslehre und eine intelligente Steuerungs- und Regelungstechnik, und das Condition Monitoring2).
Durch seine Material sparende Leichtbauweise mit Karbonfasern hat der SmartBird gezeigt, wie sich damit gleichzeitig Energie einsparen lässt. FESTO wird diese Erkenntnisse auch in seinem Herstellungsprogramm anwenden.
1) Kybernetik ist nach ihrem Begründer Norbert Wiener die Wissenschaft der Steuerung und Regelung von Maschinen, lebenden Organismen und sozialen Organisationen und wurde auch mit der Formel „die Kunst des Steuerns“ beschrieben. (WIKIPEDIA)
2) Condition Monitoring: Das Konzept des Condition Monitoring (Zustandsüberwachung) basiert auf einer regelmäßigen oder permanenten Erfassung des Maschinenzustandes durch Messung und Analyse physikalischer Größen, z.B. Schwingungen, Temperaturen, Lage/Näherung. (WIKIPEDIA)
Aufgabe 2: Zeichnung vervollständigen
Lösungsvorschlag
Original-Text zu SmartBird
Bild FESTO
Aerodynamischer Leichtbau mit aktiver Torsion
SmartBird ist ein ultraleichtes, aber leistungsstarkes Flugmodell mit einer hervorragenden Aerodynamik und maximaler Agilität. Mit dem SmartBird ist es Festo gelungen, den Vogelflug zu entschlüsseln. Der von der Silbermöwe inspirierte, bionische Technologieträ- ger kann von selbst starten, fliegen und landen – ohne zusätzlichen Antrieb. Seine Flügel schlagen dabei nicht nur auf und ab, sondern verdrehen sich gezielt. Dies geschieht durch einen aktiven Gelenk- torsionsantrieb, der in Verbindung mit einer komplexen Regelung bisher unerreichte Wirkungsgrade im Flugbetrieb realisiert. Damit gelingt Festo erstmals eine energieeffiziente, technische Adaption des natürlichen Vorbilds.
Know-how für die Automation
Die Funktionsintegration von gekoppelten Antrieben gibt wichtige Anregungen und Erkenntnisse, die Festo auf die Entwicklung und Optimierung von hybrider Antriebstechnologie übertragen kann. Der minimale Materialeinsatz und die Ausführung als extremer Leichtbau weisen den Weg für ressourcen- und energieeffiziente Konstruktionen. Das erworbene Wissen im Bereich Aerodynamik und Strömungsverhalten ermöglicht neue Ansätze und Lösungs- wege für die Automation.
Faszination Vogelflug
Es ist einer der ältesten Menschheitsträume: Fliegen wie ein Vogel, sich frei in der Luft in allen Dimensionen bewegen und die Welt mit Abstand aus der Vogelperspektive betrachten zu können.
Nicht minder faszinierend ist der Vogelflug an sich. Vögel verschaf- fen sich nur mit der Muskelkraft ihrer Flügel Auftrieb und halten sich in der Luft. Mit denselben Flügeln erzeugen sie die nötige Schubkraft, um den Strömungswiderstand zu überwinden und ih- ren Körper in Bewegung zu setzen – ohne jedes rotierende Teil. Die Funktionsintegration von Auftrieb und Vortrieb ist der Natur genial gelungen. Vögel messen, steuern und regeln ihren Bewegungsablauf fortlaufend und völlig autonom, dem Ziel des Überlebens verpflichtet. Dazu benutzen sie ihre Sinnesorgane.
Wissenschaftliche Vorläufer
Bereits im Jahr 1490 baute Leonardo da Vinci erste Schlagflügelmodelle, um dem Vogelflug näher zu kommen. Otto Lilienthal ver- öffentlichte im Jahr 1889 das Buch „Der Vogelflug als Grundlage der Fliegekunst; ein Beitrag zur Systematik der Flugtechnik“. Im Kapitel „Der Vogel als Vorbild“ beschreibt Otto Lilienthal detailliert den Flug der Möwe. In unserer Zeit gibt es Ornithopter-Projekte wie zum Beispiel die der Forschergruppe um Professor Dr. James DeLaurier von der Universität Toronto. Diese Gruppe hat es 2006 geschafft, erstmals mit einem durch Schwingenflug angetriebenen Fluggerät mit Pilot von der Landebahn abzuheben. Im August 2010 hat ein mit Muskelkraft des Piloten angetriebenes Fluggerät eine Strecke von etwa 150 Metern zurückgelegt, nachdem es zuvor auf Flughöhe geschleppt worden war.
Vogelflug entschlüsselt
2011 ist es den Ingenieuren des Bionic Learning Network von Festo gelungen, ein Flugmodell zu entwickeln, das eigenstartfähig ist und sich nur mit dem Flügelschlag und ohne Hilfe weiterer Antrie- be in die Lüfte hebt. Der SmartBird fliegt, gleitet und segelt durch die Luft.
Die Erfahrung der Bionic Learning Projekte AirRay und AirPenguin flossen in die Konzeption von SmartBird mit ein. Projektziel war es, einen bionischen Vogel nach dem Vorbild der Silbermöwe zu bauen. Die Faszination, den Vogel nur mit Hilfe des Flügelschlags starten, fliegen und landen zu lassen, war der Antrieb für die Ingenieure von SmartBird. Luft gezielt zu bewegen, ist eine Kernkompetenz von Festo, die das Unternehmen seit über 50 Jahren antreibt.
Die außergewöhnliche Besonderheit von SmartBird ist die aktive Torsion des Flügels ohne zusätzliche Auftriebshilfen. Die Zielvorgaben von SmartBird waren eine energie- und ressourceneffiziente Gesamtstruktur mit minimalem Gesamtgewicht, begleitet von einer Funktionsintegration von Vor- sowie Auftrieb in den Flügeln und der Flugsteuerung im Rumpf- und Schwanzbereich. Weitere Anforderungen waren eine hervorragende Aerodynamik, eine hohe Leistungsdichte im Antrieb sowie eine maximale Agilität des Flugobjektes. Durch eine wissenschaftliche Begleitung konnte in nachvollziehbaren Arbeitsschritten ein intelligenter kybernetischer Gesamtentwurf realisiert werden.
Gezielt verdreht: Aktive Torsion beim Flügelaufschlag
a) Aktiver Gelenktorsionsantrieb
Der Ablauf des Schwingenflugs besteht aus zwei wesentlichen Bewegungen. Zum einen schlagen die Flügel auf und ab, wobei vom Rumpf bis zur Flügelspitze die Auslenkungen über eine Hebelmechanik größer werden. Zum anderen verdreht sich der Flügel so, dass die Flügelnase beim Aufschlag nach oben zeigt und der Flügel einen positiven Anstellwinkel hat. Wird die Verdrehung allein der Elastizität des Flügels überlassen, spricht man von passiver Torsion. Wird die Torsion aber gezielt in Größe und zeitlichem Verlauf durch einen Aktuator angesteuert, dann wird aus der passiven Torsion eine aktive Torsion.
Rumpf: sicheres Gehäuse für die Technik
Im Rumpf sind Batterie, Motor und Getriebe, die Kurbelmechanik sowie die Steuer- und Regelelektronik untergebracht. Der Außenläufermotor schlägt die Flügel über ein zweistufiges Stirnradgetriebe mit der Untersetzung 1:45 auf und ab. Er ist mit drei Hall-Sensoren ausgestattet, um die genaue Flügelstellung bestimmen zu können. Vom Getriebe aus wird über ein Pleuelgelenk die Schlagleistung in den Handflügel geleitet. Die Kurbelmechanik hat keinen Totpunkt und erzeugt dadurch einen runden Lauf mit geringen Lastspitzen. Dies bewirkt einen ruhigen Flug.
Synchron ist die Kopf- und Rumpfpartie über zwei elektrische Antriebe und Schubstangen gegenläufig in jede Raumrichtung zu bewegen. Hierdurch werden eine aerodynamische Rumpfbiegung und gleichzeitig eine Gewichtsverlagerung erreicht, wodurch SmartBird sehr agil und wendig wird.
Flügel: Auf- und Vortrieb des Vogels
Der Flügel besteht aus einem zweiteiligen Armflügelholm mit einer Achsaufnahme am Rumpfaustritt, einem Trapezgelenk, wie dies in vergrößerter Form bei Baggern vorkommt, und einem Handflügelholm. Das Trapezgelenk bewirkt eine Übersetzung von 1:3. Der Armflügel erzeugt den Auftrieb, der Handflügel nach dem Trapezgelenk den Vortrieb. Die Holme von Armflügel als auch Handflügel ind torsionssteif ausgeführt. Am Ende des Handflügels befindet sich der Servomotor für die aktive Torsion, der den gesamten Flügel gegenüber dem Holm über eine Außenflügelrippe verdreht.
Optimaler Schub durch partiell lineare Kinematik
Schlägt SmartBird die Flügel nach oben, verdreht der Servomotor für die aktive Torsion das Handflügelende auf einen positiven Anstellwinkel, der innerhalb eines Bruchteils der Flügelschlagperiode auf einen negativen Anstellwinkel umgeschlagen wird. Zwischen diesen Umkehrphasen bleibt der Torsionswinkel konstant. Durch diesen Bewegungsablauf wird die Strömung am Profil optimal für die Erzeugung der Schubkraft genutzt.
Schwanz: Hilfe bei Auftrieb und Steuerung
Auch der Schwanz des SmartBird erzeugt Auftrieb. Er hat sowohl Höhen- als auch Seitenruderfunktion. Fliegt der Vogel geradeaus, stabilisiert die V-Stellung der beiden Schlagflügel den Vogel, analog zu einem herkömmlichen Seitenleitwerk eines Flugzeugs. Zum Einleiten einer Kurve wird der Schwanz schräg gestellt. Kippt der Schwanz um die Längsachse, bewirkt dies ein Gieren um die Hochachse.
b) Messen, Steuern und Regeln
Die On-Board-Elektronik ermöglicht eine präzise und somit effiziente Ansteuerung der Flügeltorsion in Abhängigkeit von der Flügelposition. Ein leistungsstarker, Mikrocontroller berechnet dazu die optimale Einstellung zweier Servomotoren, die jeweils die Flügeltorsion einstellen. Die Synchronisierung des Bewegungsablaufs zwischen der Schlagbewegung und der Torsionsbewegung erfolgt über das Auslesen der absoluten Position des Motors für die Schlagbewegung mit Hilfe von drei Hall-Sensoren. Der aktive Gelenktorsionsantrieb verlangt eine präzise Abstimmung der beiden Bewegungsformen Schlagen und Verwinden und ist damit unter vollständiger und fortlaufender Kontrolle.
Intelligentes Monitoring
Eine bidirektionale Funkkommunikation mittels ZigBee Protocol erlaubt die Überwachung der Flügelposition und Flügeltorsion. Sie übermittelt Betriebsdaten wie den Batterieladezustand, die Leistungsaufnahme und die Steuereingaben des Piloten. Zusätzlich können die Steuerparameter der Torsion während des Fluges in Echtzeit eingestellt und somit optimiert werden. Dieses intelligente Monitoring ermöglicht es, zusammen mit der elektronischen Steuerung die Mechanik in Sekundenbruchteilen an neue Situationen zu adaptieren. Der mechanische Aufbau des Vogelmodells konnte dadurch einfacher, effizienter und leichter konstruiert werden. Dadurch wurde der Wirkungsgrad des biomechatronischen Gesamtsystems für den Flugbetrieb optimiert.
Theoretische Grundlage
Theoretisch ist ein hoher aerodynamischer Wirkungsgrad nur durch eine aktive Torsion zu erzielen, wobei eine geringe Leistung durch einen Aktuator zugeführt werden muss. Die aufgebrachte Schlagleistung wird mit aktiver Torsion sehr effizient in Schubleistung umgesetzt. Der aerodynamische Wirkungsgrad ist das Verhältnis von erzielter Schubleistung zu aufgebrachter Schlag- und Drehleistung.
c) Wissenschaftliche Begleitung
Untersucht und gemessen wurde SmartBird in seiner Entwicklung nach dem Vorbild des französischen Physiologen Étienne-Jules Marey (1830 – 1904). Er ließ Vögel in einem Rundlauf fliegen und untersuchte ihren Flug. Für die Bestimmung des elektromechanischen Wirkungsgrads wurde eigens ein Versuchsgerät entwickelt, ein so genanntes Bremsdynamometer.
Wirkungsgrade als Maß für die Effizienz
SmartBird und seine Vorgängermodelle haben elektromechanische Wirkungsgrade bis etwa 45 % gezeigt. Bei Messungen im Rundlauf sind für den aerodynamischen Wirkungsgrad Werte bis zu 80 % ermittelt worden.
Der Gesamtwirkungsgrad wird gebildet aus dem Produkt der beiden Teilwirkungsgrade. Da der aerodynamische Wirkungsgrad zwar berechenbar, aber nicht direkt messbar ist, ergibt er sich aus den Resultaten der Messung des Gesamtwirkungsgrades und des elektromechanischen Wirkungsgrades.
Zur Ermittlung des elektromechanischen Wirkungsgrades liefert das Bremsdynamometer über die Messung von Drehmoment und Winkelgeschwindigkeit fortlaufend die verfügbare Leistung, die beim Flug abgegeben wird. Hierfür wird die Hubbewegung des Schlagantriebs auf eine Welle übertragen, die von einer Bremsbacke belastet wird. Ein Kraftsensor hält dabei den Hebelarm der Bremse. Ein Winkelsensor misst die Drehung der Welle. Drehmoment und Winkelgeschwindigkeit liefern die mechanische Leistung. Im Verhältnis zur eingespeisten elektrischen Leistung ergibt sich der elektromechanische Wirkungsgrad.
Strömung optimal nutzen
Vor- und Auftrieb werden ausschließlich durch das Schlagen der Flügel erzeugt und benötigen rund 25 Watt Leistung. Dies bei einem Gesamtgewicht von ca. 400 Gramm und einer Flügelspannweite von zwei Metern. So ist SmartBird ein hervorragendes Beispiel für die Funktionsintegration, für den ressourceneffizienten extremen Leichtbau und zugleich ein Beispiel, wie Strömungsphänomene in Luft optimal ausgenutzt werden können.
Die Steuerung des Ablaufs von Flügelschlag und Verdrehung erfolgt im Takt weniger Millisekunden und bewirkt optimale Strömungsverhältnisse der Luft am Flügel. Das Flugmodell SmartBird kommt in der Außenhülle ohne rotierende Teile aus und ist somit nicht verletzungsgefährdend.
Paradigmenwechsel durch Bionik
Mit dem SmartBird gelingt Festo im Rahmen des Bionic Learning Network erneut der Übertrag eines natürlichen Prinzips auf einen technischen Bereich. SmartBird regt an, neue Lösungen in der Automation zu suchen und dabei die Natur im Blick zu haben.
d) Mechatronischer Gesamtentwurf
SmartBird ist ein mechatronischer und kybernetischer Gesamtentwurf, der zahlreiche einzelne Lösungen zu einem faszinierenden Gesamtobjekt verbindet. Erst die Integration der intelligenten Mechanik, der elektrischen Antriebstechnik, der Erkenntnisse aus der Strömungslehre, der intelligenten Steuerungs- und Regelungstechnik, des Condition Monitoring und der permanenten wissenschaftlichen Validierung und des Transfers der wissenschaftlichen Erkenntnisse in die Praxis machten SmartBird möglich.
Bereits jetzt nutzt Festo sein Know-how im Strömungsverhalten für die Entwicklung aktueller Zylinder- und Ventilgenerationen. Durch Analyse der Strömungsphänomene beim SmartBird hat sich Festo zusätzliches Wissen für die Optimierung seiner Produktlösungen angeeignet und gelernt, noch effizienter zu konstruieren. Diese Konstruktionseffizienz ermöglicht es, kompakt gebaute Produkte zu entwickeln, die weniger Einbauraum benötigen, strömungsoptimiert sind und dadurch energieeffizienter werden.
Energieeffizient und ressourcenschonend
Durch seine optimierte Form und seine Leichtbauweise in Karbonfasertechnik ist der SmartBird ein hervorragendes Beispiel für energieeffizientes Bewegen und einen ressourcenschonenden Umgang mit dem verwendeten Material. Die Funktionsintegration zweier Antriebsarten in einer hybriden Lösung steigert ebenfalls die Ressourceneffizenz.
Diese Funktionsintegration gibt Aufschlüsse für die Entwicklung und Optimierung von hybriden Antriebstechnologien. Schon jetzt kombiniert Festo die Vorzüge der Pneumatik mit den Vorteilen von elektrischen Linearachsen zu einer schnellen und hochpräzisen linearen Antriebstechnologie.
Mögliche Applikationsfelder
Die Einsatzmöglichkeiten von gekoppelten Antrieben für Schlag- und Drehbewegungen reichen von Generatoren zur Energiegewinnung aus Wasser, so genannten Hubflügelgeneratoren, bis hin zu neuen Stellantrieben in der Prozessautomation.
Durch den Paradigmenwechsel der Bionik forciert, hat Festo bereits in der Vergangenheit Produkte entwickelt, die ihre Akzeptanz in der Industrie gefunden haben – im Fokus: Energieeffizienz und Ressourcenschonung.
Betriebssicherheit durch Condition Monitoring
Während des Flugs von SmartBird werden permanent die Daten von Flügelposition und Flügeltorsion erfasst. Die Steuerparameter der Torsion können in Echtzeit während des Fluges eingestellt und somit optimiert werden. Das gewährleistet die Flugstabilität und somit die Betriebssicherheit des Vogels.